

【点击观看视频】Go 调度原理?
goroutine调度的本质就是将 **Goroutine (G)**按照一定算法放到CPU上去执行。
CPU感知不到Goroutine,只知道内核线程,所以需要Go调度器将协程调度到内核线程上面去,然后操作系统调度器将内核线程放到CPU上去执行
M是对内核级线程的封装,所以Go调度器的工作就是将G分配到M
Go 调度器的实现不是一蹴而就的,它的调度模型与算法也是几经演化,从最初的 GM 模型、到 GMP模型,从不支持抢占,到支持协作式抢占,再到支持基于信号的异步抢占,经历了不断地优化与打磨。
# 设计思想
线程复用(work stealing 机制和hand off 机制)
利用并行(利用多核CPU)
抢占调度(解决公平性问题)
# 调度对象
Go 调度器
Go 调度器是属于Go runtime中的一部分,Go runtime负责实现Go的并发调度、垃圾回收、内存堆栈管理等关键功能
# 被调度对象
G的来源
- P的runnext(只有1个G,局部性原理,永远会被最先调度执行)
- P的本地队列(数组,最多256个G)
- 全局G队列(链表,无限制)
- 网络轮询器network poller(存放网络调用被阻塞的G)
P的来源
- 全局P队列(数组,GOMAXPROCS个P)
M的来源
- 休眠线程队列(未绑定P,长时间休眠会等待GC回收销毁)
- 运行线程(绑定P,指向P中的G)
- 自旋线程(绑定P,指向M的G0)
其中运行线程数 + 自旋线程数 <= P的数量(GOMAXPROCS),M个数 >= P个数
# 调度流程
协程的调度采用了生产者-消费者模型,实现了用户任务与调度器的解耦
生产端我们开启的每个协程都是一个计算任务,这些任务会被提交给 go 的 runtime。如果计算任务非常多,有成千上万个,那么这些任务是不可能同时被立刻执行的,所以这个计算任务一定会被先暂存起来,一般的做法是放到内存的队列中等待被执行。
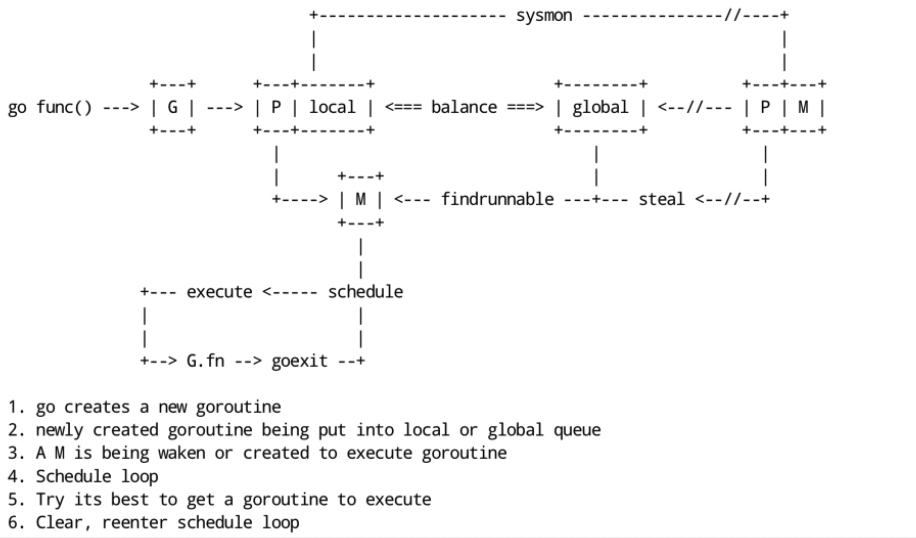
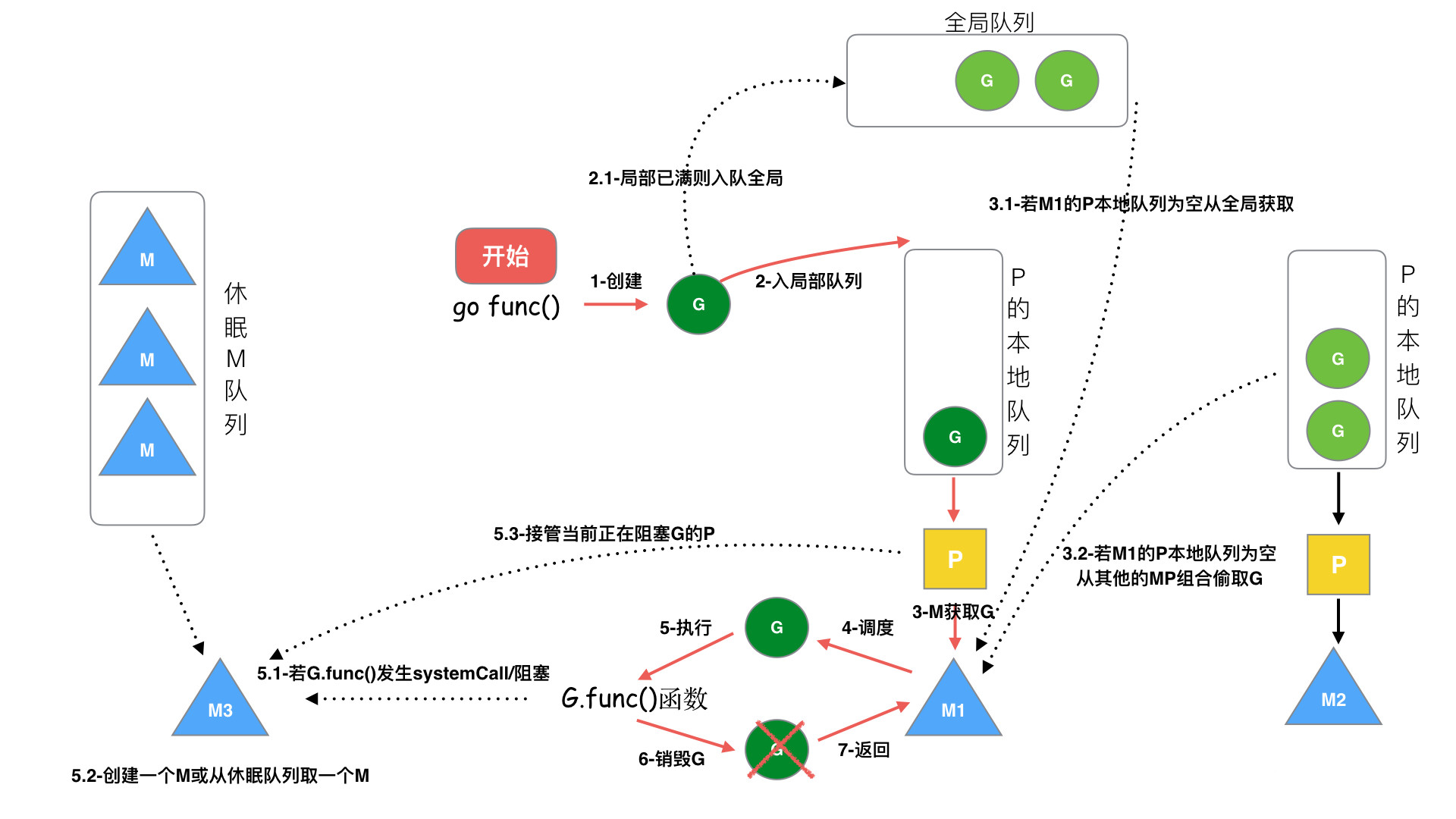
G的生命周期:G 从创建、保存、被获取、调度和执行、阻塞、销毁,步骤如下:
步骤 1:创建 G,关键字 go func() 创建 G
步骤 2:保存 G,创建的 G 优先保存到本地队列 P,如果 P 满了,则会平衡部分P到全局队列中
步骤3:唤醒或者新建M执行任务,进入调度循环(步骤4,5,6)
步骤 4:M 获取 G,M首先从P的本地队列获取 G,如果 P为空,则从全局队列获取 G,如果全局队列也为空,则从另一个本地队列偷取一半数量的 G(负载均衡),这种从其它P偷的方式称之为 work stealing
步骤 5:M 调度和执行 G,M调用 G.func() 函数执行 G
- 如果 M在执行 G 的过程发生系统调用阻塞(同步),会阻塞G和M(操作系统限制),此时P会和当前M解绑,并寻找新的M,如果没有空闲的M就会新建一个M ,接管正在阻塞G所属的P,接着继续执行 P中其余的G,这种阻塞后释放P的方式称之为hand off。当系统调用结束后,这个G会尝试获取一个空闲的P执行,优先获取之前绑定的P,并放入到这个P的本地队列,如果获取不到P,那么这个线程M变成休眠状态,加入到空闲线程中,然后这个G会被放入到全局队列中。
- 如果M在执行G的过程发生网络IO等操作阻塞时(异步),阻塞G,不会阻塞M。M会寻找P中其它可执行的G继续执行,G会被网络轮询器network poller 接手,当阻塞的G恢复后,G1从network poller 被移回到P的 LRQ 中,重新进入可执行状态。异步情况下,通过调度,Go scheduler 成功地将 I/O 的任务转变成了 CPU 任务,或者说将内核级别的线程切换转变成了用户级别的 goroutine 切换,大大提高了效率。
步骤6:M执行完G后清理现场,重新进入调度循环(将M上运⾏的goroutine切换为G0,G0负责调度时协程的切换)
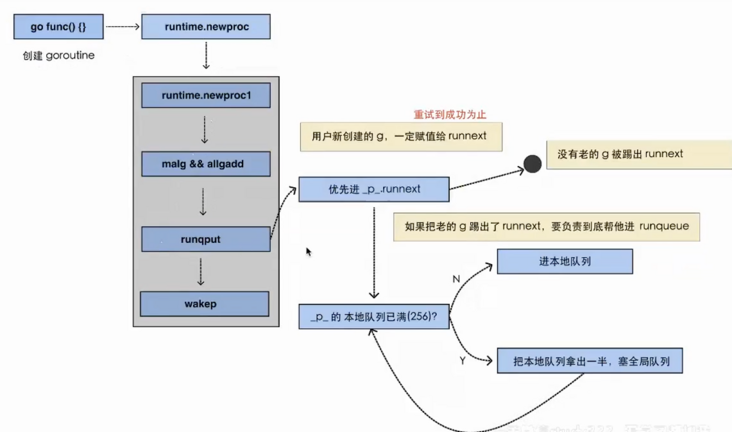
其中步骤2中保存 G的详细流程如下:
- 执行 go func 的时候,主线程 M0 会调用 newproc()生成一个 G 结构体,这里会先选定当前 M0 上的 P 结构
- 每个协程 G 都会被尝试先放到 P 中的 runnext,若 runnext 为空则放到 runnext 中,生产结束
- 若 runnext 满,则将原来 runnext 中的 G 踢到本地队列中,将当前 G 放到 runnext 中,生产结束
- 若本地队列也满了,则将本地队列中的 G 拿出一半,放到全局队列中,生产结束。
# 调度时机
什么时候进行调度(执行/切换)?
在以下情形下,会切换正在执行的goroutine
- 抢占式调度
- sysmon 检测到协程运行过久(比如sleep,死循环)
- 切换到g0,进入调度循环
- sysmon 检测到协程运行过久(比如sleep,死循环)
- 主动调度
- 新起一个协程和协程执行完毕
- 触发调度循环
- 主动调用runtime.Gosched()
- 切换到g0,进入调度循环
- 垃圾回收之后
- stw之后,会重新选择g开始执行
- 新起一个协程和协程执行完毕
- 被动调度
- 系统调用(比如文件IO)阻塞(同步)
- 阻塞G和M,P与M分离,将P交给其它M绑定,其它M执行P的剩余G
- 网络IO调用阻塞(异步)
- 阻塞G,G移动到NetPoller,M执行P的剩余G
- atomic/mutex/channel等阻塞(异步)
- 阻塞G,G移动到channel的等待队列中,M执行P的剩余G
- 系统调用(比如文件IO)阻塞(同步)
# 调度策略
使用什么策略来挑选下一个goroutine执行?
由于 P 中的 G 分布在 runnext、本地队列、全局队列、网络轮询器中,则需要挨个判断是否有可执行的 G,大体逻辑如下:
- 每执行61次调度循环,从全局队列获取G,若有则直接返回
- 从P 上的 runnext 看一下是否有 G,若有则直接返回
- 从P 上的 本地队列 看一下是否有 G,若有则直接返回
- 上面都没查找到时,则去全局队列、网络轮询器查找或者从其他 P 中窃取,一直阻塞直到获取到一个可用的 G 为止
源码实现如下:
func schedule() {
_g_ := getg()
var gp *g
var inheritTime bool
...
if gp == nil {
// 每执行61次调度循环会看一下全局队列。为了保证公平,避免全局队列一直无法得到执行的情况,当全局运行队列中有待执行的G时,通过schedtick保证有一定几率会从全局的运行队列中查找对应的Goroutine;
if _g_.m.p.ptr().schedtick%61 == 0 && sched.runqsize > 0 {
lock(&sched.lock)
gp = globrunqget(_g_.m.p.ptr(), 1)
unlock(&sched.lock)
}
}
if gp == nil {
// 先尝试从P的runnext和本地队列查找G
gp, inheritTime = runqget(_g_.m.p.ptr())
}
if gp == nil {
// 仍找不到,去全局队列中查找。还找不到,要去网络轮询器中查找是否有G等待运行;仍找不到,则尝试从其他P中窃取G来执行。
gp, inheritTime = findrunnable() // blocks until work is available
// 这个函数是阻塞的,执行到这里一定会获取到一个可执行的G
}
...
// 调用execute,继续调度循环
execute(gp, inheritTime)
}
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
从全局队列查找时,如果要所有 P 平分全局队列中的 G,每个 P 要分得多少个,这里假设会分得 n 个。然后把这 n 个 G,转移到当前 G 所在 P 的本地队列中去。但是最多不能超过 P 本地队列长度的一半(即 128)。这样做的目的是,如果下次调度循环到来的时候,就不必去加锁到全局队列中在获取一次 G 了,性能得到了很好的保障。
func globrunqget(_p_ *p, max int32) *g {
...
// gomaxprocs = p的数量
// sched.runqsize是全局队列长度
// 这里n = 全局队列的G平分到每个P本地队列上的数量 + 1
n := sched.runqsize/gomaxprocs + 1
if n > sched.runqsize {
n = sched.runqsize
}
if max > 0 && n > max {
n = max
}
// 平分后的数量n不能超过本地队列长度的一半,也就是128
if n > int32(len(_p_.runq))/2 {
n = int32(len(_p_.runq)) / 2
}
// 执行将G从全局队列中取n个分到当前P本地队列的操作
sched.runqsize -= n
gp := sched.runq.pop()
n--
for ; n > 0; n-- {
gp1 := sched.runq.pop()
runqput(_p_, gp1, false)
}
return gp
}
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
从其它P查找时,会偷一半的G过来放到当前P的本地队列